كتب : نهله مقلد – محمد الخولي
معلوم أن للروبوتات تطبيقات كثيرة جدًّا، فلها مِن ثَم أشكال وتصميمات محتمَلة لا حصر لها، تتعذر تجربتها كلها في كل مرة لمعرفة الأنسب منها؛ فحلّ باحثون من معهد ماساتشوستس للتقنية هذه المشكلة، بابتكار نظام يحاكي التصميمات لترشيح الأنسب كل ما عليك فعله هو إعلامه بالمكونات الروبوتية المتاحة، والبيئة والتضاريس التي سيتعرض لها الروبوت، فيتولى النظام تصميم مئات آلاف الروبوتات المحتمَلة، واختيار التصميم الأنسب. سمَّاه الباحثون «روبو جرامر»، وبسطوا تفاصيله في ورقة بحثية مقرَّر تقديمها الشهر الجاري في مؤتمر «سيجراف آسيا.»
اكد آلان تشاو،مؤلف الورقة الأول وطالب الدكتوراه في مختبر علوم الحاسوب والذكاء الاصطناعي التابع للمعهد، بمشكلة تشابُه الروبوتات على الرغم من تطبيقاتها العديدة، فمعظمها رباعي السيقان مثلًا؛ ففكر هو وفريقه في ابتكار هذا النظام الذي لا يتقيد بالتصميمات التقليدية، ويُبدع تصاميم أنسب للمهام لكن اضطرتهم لانهائية التصميمات المحتمَلة إلى وضع قواعد أساسية تَحكُم النظام، لكيلا يقترح تصميمات عشوائية غير عملية، كإلزامه بوصْل أجزاء السيقان بمفاصل، لا أجزاء سيقانية إضافية جامدة تُعذِّر حركته.
ووضعوا مجموعة قواعد تَحكُم تسلسُل حركات الروبوتات، تجعل الأولوية للحركة إلى الأمام، بخوارزمية تُدعى «التحكم الاستشرافي؛» ثم يأتي دور انتقاء الروبوتات الأعلى أداءً، بخوارزمية تحاكي التصميمات وتقدِّر أيها أنسب للمهام المعيَّنة، وتتعلم من كل تجربة لتحسِّن تقديراتها شيئًا فشيئًا.
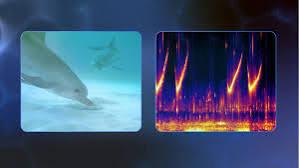
وذكر تشاو أن النظام مستوحًى من عالم الحيوان، خصوصًا المفصليات، لمرونة تصميمها التي جعلتها تهيمن على الأنواع الحيوانية، بنسبة 80% من إجماليّها؛ وإن أضافوا إليه عناصر ميكانيكية صناعية، كإمكانية استعمال عجلات بدل السيقان.